I felt bored of using the universal PCB or the DOT board for my projects so i thought of making one printed circuit board after googling for couple of days i found the chemicals for this process
1)FeCl3
2)H2O(available in your everywhere for free)
3)H2O2(available in medical shops called hydrogen peroxide
before every thing first you have to make a schematic and board file of your circuit.
for that you require any CAD software for PCB designing.
i used Eagle software....its so cool..
first make schematic of the circuit of your interest and make its board file
save the board file as PDF and print it in black colour using a laser printer
NOTE: while printing do not forget to keep it in its original size. If you shrink the image you won't get a perfect PCB
take a print out and soak it in worm water.

take a PCB copper clad sheet of same size

place it in such a whay that copper side toches the print side of the paper and heat it with iron box

after that apply hydrogen peraxide on it and sloly rub the paper




take a permanant CD marker and correct the missed paths on it

finally dip this board in to ferric chloride. actually it is available in the form of power . you have to mix it with water and make the solution.
after that dip it completely in the solution and mix it slowly. the chemical is a kind of dangerous. so i made a mixing mechanism for that ..

take a look at the video:
after that you will need a PCB driller to make the holes for the components.it is a hand driller will cost around Rs 100/-
Making PCBs is fun but you must be careful with the chemicals
Preferred to use hand gloves.
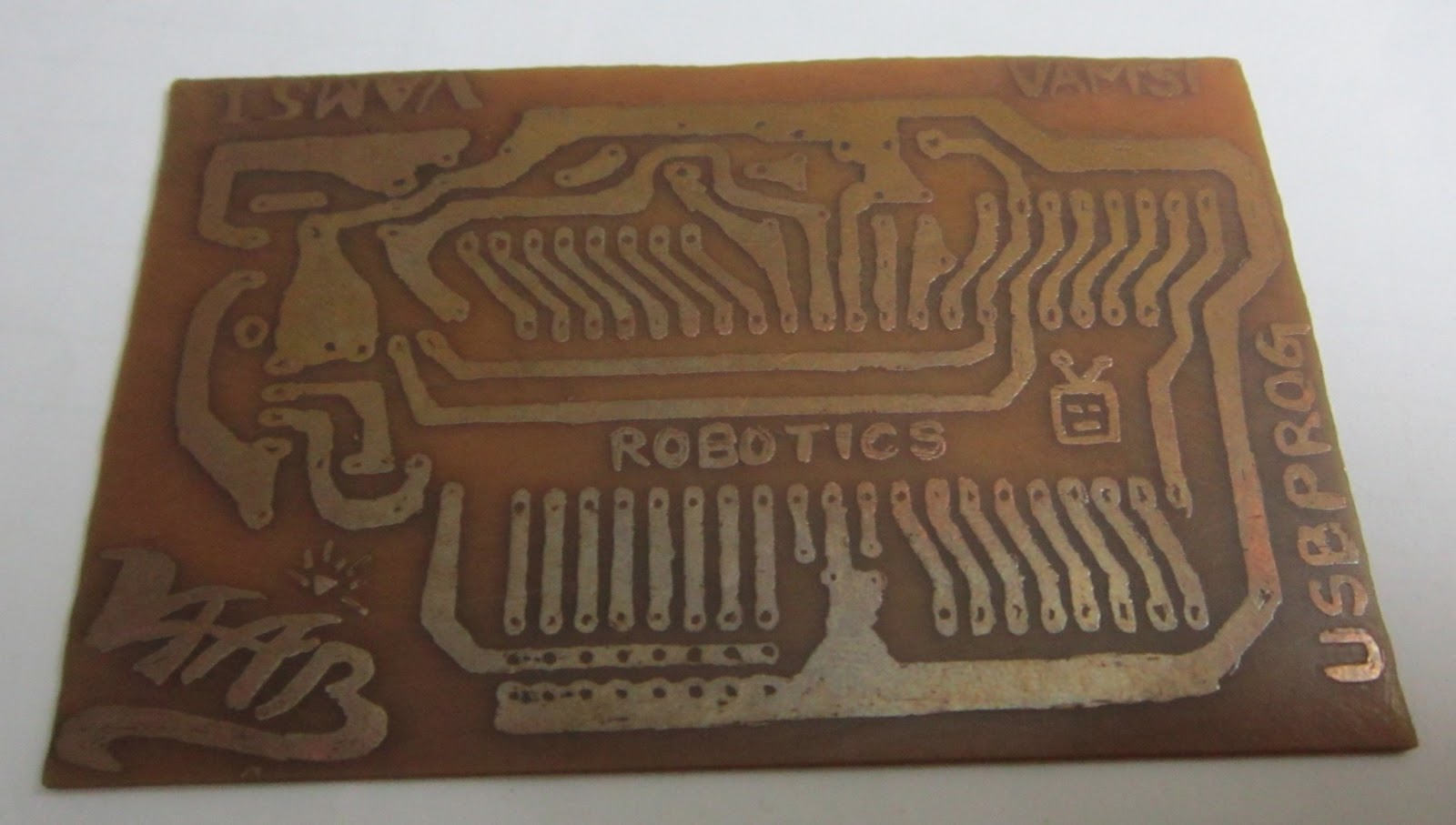
Enjoy.........you can write your names and logos on PCBs using a permanent marker.............
just like the first picture.